Phased-locked loop
This chapter describes the Phase-locked loop (PLL) Component implemented in VSlib. Currently, the only implemented PLL algorithm is a Rotating Reference Frame (SRF) PLL.
General interface
The PLL Component is a composite Component, owning a AbcToDq0Transform and a PID. Therefore, all Parameters of these children Components must be set before the PLL is ready to be used.
The PLL Component implements a two interaction methods, called synchronise and synchroniseWithDQ. Both take three double-precision floating-point arguments: a, b, and c for each component of the three-phase current or voltage. The output of synchronise is a single value: \(\omega t\), being the output of the single iteration of locking the phase. The output is guaranteed to fit in \([0, 2\pi]\) range, if the angle offset is set to 0. The output of synchroniseWithDQ returns a tuple with \(\omega t\), and in addition d and q components of the DQ0 frame.
The algorithm implemented in VSlib is equivalent to the following Simulink implementation:
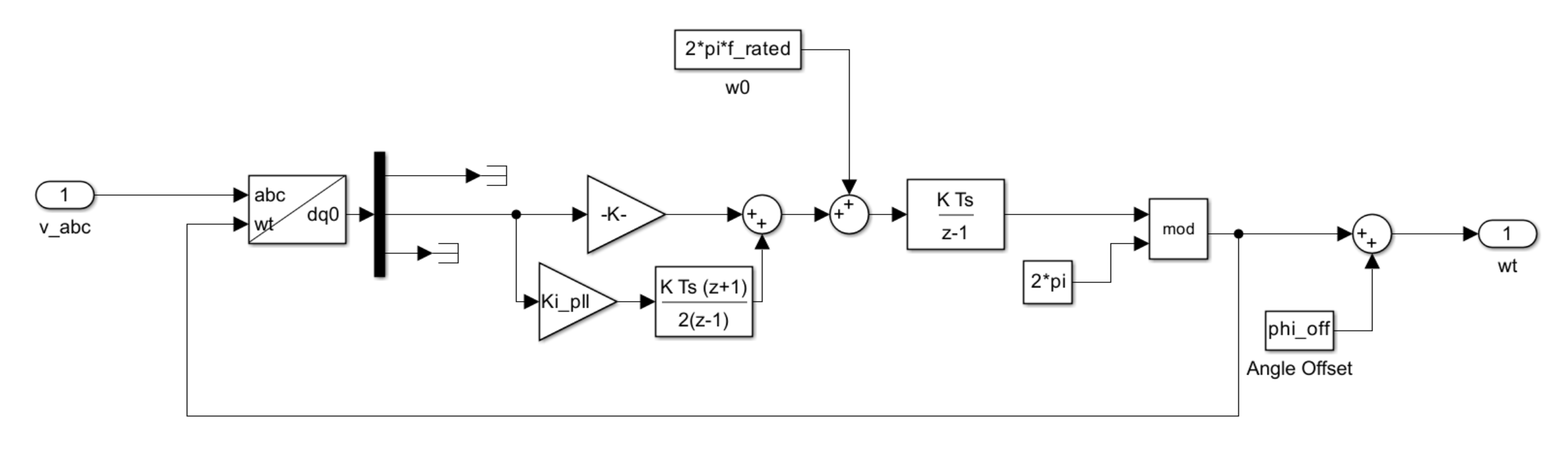
For more details regarding the API, see the API documentation for SRF PLL.
Usage example
#include <numbers>
#include "rootComponent.h"
#include "srfPll.h"
using namespace vslib;
void your_function(RootComponent& root)
{
SRFPLL pll("pll", root);
// PI parameters need setting, here we assume the following are set:
// kp = 50;
// ki = 200;
// kd = 0.0;
// kff = 0.0;
// b = 1.0;
// c = 1.0;
// N = 1.0; // should be 1 when kd = 0
// T = 1.0e-4;
// f0 = 1e-12;
// actuation limit at numerical limits
const double v_a = 1.0;
const double v_b = -0.5;
const double v_c = -0.5;
const double wt_pll = converter.pll.synchronise(v_a, v_b, v_c);
// If observability of d an q components is required:
const auto [wt, d, q] = converter.pll.synchroniseWithDQ(v_a, v_b, v_c);
return 0;
}
Example usage in a vloop:
#include "vslib.hpp"
namespace fgc::user
{
class Converter : public vslib::RootComponent
{
public:
Converter() noexcept
: vslib::RootComponent("example"),
interrupt_1("stg", *this, 128, vslib::InterruptPriority::high, RTTask),
pll("pll_1", *this)
{
}
// Define your interrupts here
vslib::PeripheralInterrupt<Converter> interrupt_1;
// Define your public Components here
vslib::SRFPLL pll;
void init() override
{
interrupt_1.start();
}
void backgroundTask() override
{
}
static void RTTask(Converter& converter)
{
// Read the input 3-phase voltage values:
const double v_a = converter.m_data[0];
const double v_b = converter.m_data[1];
const double v_c = converter.m_data[2];
// if you need only the angle:
const double wt_pll = converter.pll.synchronise(v_a, v_b, v_c);
// If observability of d an q components is required:
const auto [wt, d, q] = converter.pll.synchroniseWithDQ(v_a, v_b, v_c);
}
private:
// actual source of data omitted for simplicity
std::array<double, 3> m_data{0.0};
};
} // namespace fgc::user
Performance
The execution time of the SRFPLL Component averages to 365 ns per call. This is about 40 ns more than an AbcToDq0Transform and a PID controller, spent on calculating the next step of the forward Euler algorithm and a floating-point modulo operation.